
Шагающие роботы могут обеспечить более эффективное роботизированное исследование Луны на месте по сравнению с другими типами роботов. Это то, на что надеется обратить внимание недавнее научное исследование, представленное на 56-й конференции по лунным и планетарным наукам, когда команда исследователей из Университета Южной Калифорнии (USC) обсуждала преимущества использования роботов с ножками для исследования Луны в отношении скорости походки (walking speed). Проведенная работа может помочь инженерам, учёным, разработчикам миссий и астронавтам создать новые роботизированные конструкции для более эффективного выполнения научных задач и целей будущих миссий на поверхности Луны.
Доктор Фэйфэй Цянь, доцент WiSE Габилан и главный исследователь лаборатории динамики передвижения и навигации роботов (RoboLAND) в Инженерной школе Витерби при Университете Южной Калифорнии, а также соавтор исследования рассказал изданию Universe Today о том, что готовясь к исследованию Луны, Марса и других планет, специалисты хотят, чтобы их роботы могли эффективно перемещаться по сложным поверхностям планет, которые часто состоят из мягкого песка, крутых склонов и скал. Как и мы, шагающие роботы, похожие на собак, могут перемещаться по широкому спектру сложных ландшафтов. Целью для ученых является разработка такой технологии, которая позволит будущим шагающим марсоходам с улучшенной мобильностью и сенсорными способностями исследовать эти планеты.

В ходе исследования учёные протестировали два типа походки с использованием двух типов песка для своих четвероногих роботов Crawl-N-Sense и Trot Walk, которые демонстрировали более медленную и более быструю походку соответственно. В то время как робот Crawl-N-Sense передвигал по одной ноге за раз, используя остальные три для определения положения в пространстве и сохранения равновесия, робот Trot Walk передвигал диагональные ноги одновременно, имитируя робота Ghost Robotics Spirit 40, которого часто можно увидеть в социальных сетях. Оба робота прошли по однородному и неоднородному песку, последний из которых имел поверхностную корку. Однородный песок использовался для оценки глубины проникновения ног робота, а неоднородный — для оценки прочности песка под ногами робота. Доктор Цянь добавил, что самый важный результат заключается в том, что группа продемонстрировала новую способность этих роботов-собак использовать свои лапы для измерения свойств поверхности планеты во время ходьбы. Люди и животные способны "чувствовать" поверхность под ногами и соответствующим образом адаптировать свою походку.
Если мы сможем научить наших роботов делать то же самое, они смогут адаптировать своё передвижение в зависимости от мягкости почвы на планете и потенциально избежать катастрофических сбоев, из-за которых марсоход "Кьюриосити" был вынужден прервать свою миссию.
Доктор Фэйфэй Цянь, доцент WiSE

Более того, роботы потенциально могут обнаружить наличие водяного льда на Луне, просто прогуливаясь по ней! Это может позволить этим роботам-собакам-разведчикам эффективно находить следы воды или другие интересные с научной точки зрения признаки С момента зарождения космической эры роботизированное исследование поверхности планет стало краеугольным камнем научных миссий. Несколько стран отправили посадочные модули и марсоходы на Луну, Марс и крупнейший спутник Сатурна — Титан. В зависимости от параметров миссии и научных целей зонд мог быть посадочным модулем или марсоходом. Это исследование может стать первым случаем, когда шагающие роботы будут использоваться на поверхности другого небесного тела.
Несмотря на то, что это исследование успешно продемонстрировало возможность использования шагающих роботов для исследования поверхности Луны, до их развёртывания на Луне ещё далеко. Это связано с тем, что космические миссии проходят тщательный и длительный процесс отбора, включающий в себя бесчисленные испытания, перепроектирование, этапы эксплуатации и финансирование, на которые может уйти несколько лет. Итак, каковы следующие шаги для того, чтобы шагающие роботы на Луне стали реальностью?
Один из ключевых следующих шагов — научить робота понимать, что означают силы, которые он ощущает в своих ногах, чтобы он мог распознавать их и сообщать нам (людям). Другой ключевой шаг — выяснить, какие стратегии должен использовать робот, чтобы ходить по разным типам сложных поверхностей планет.
Доктор Фэйфэй Цянь, доцент WiSE

Эксперт пояснил, что специалисты могут обучить на Земле робота с использованием широкого спектра материалов реголита как в лаборатории, так и в полевых условия. Они уже отправляли роботов на тренировки во многие планетарные аналогичные среды, включая Уайт-Сэндс в Нью-Мексико, место, находится пустыня, похожая на Марс, и на гору Худ в Орегоне, где располагается вулканическая ледниковая гора, похожая на Луну.
Это исследование проводится в то время, когда NASA готовится отправить людей на Луну впервые с 1972 года, когда состоялся полёт "Аполлона-17", в рамках своей программы "Артемида", в том числе высадить на лунную поверхность первую женщину и темнокожего человека. Цели программы "Артемида" — обеспечить постоянное и долгосрочное присутствие человека на Луне, а также протестировать новые и разработать технологии для будущих лунных миссий и пилотируемых полётов на Марс в рамках архитектуры "От Луны к Марсу" NASA.
Доктор Цянь заметил в интервью, что самом деле группа сотрудничала с компанией Blue Origin (подразделение Honeybee Robotics) ради того, чтобы создать космическую версию нашего робота и принять участие в миссии "Артемида IV". Конечно, есть определённые проблемы, которые необходимо решить, чтобы отправить робота в космос, например, как найти достаточно энергии, чтобы робот мог преодолевать большие расстояния (например, потенциально исследовать постоянно затенённую область), и как рассеивать тепло. Ученые надеются, что однажды их роботы-собаки будут бродить по Луне, помогая исследовать (или даже строить) будущую среду обитания для человека.
Ученые показали, как тень Титана пересекает Сатурн.
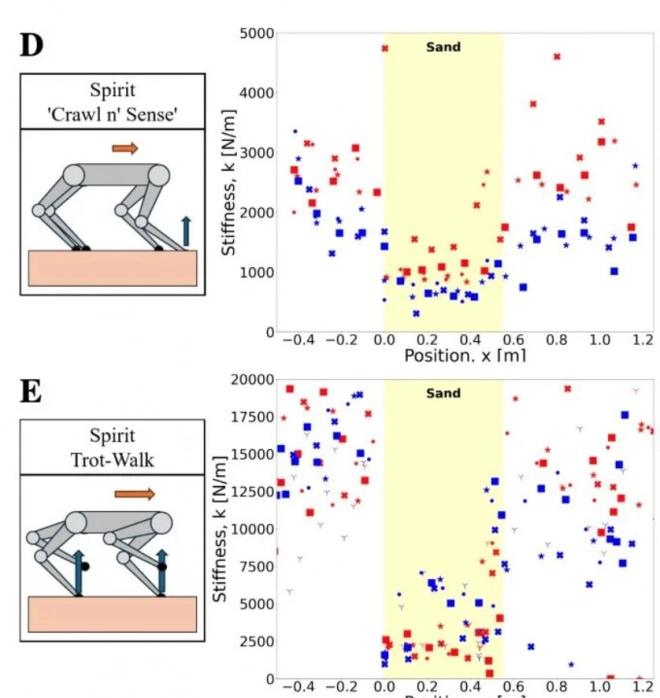
Фото и видео: YouTube / RoboLAND; Zhang et al. (2025)
Обсуждение ( 0 ) Посмотреть все